Los avances en la cirugía están centrados, fundamentalmente, en la minimización de la invasividad de los procedimientos quirúrgicos para la reducción de daños en el paciente que puedan afectar a su calidad de vida.
En este sentido, la cirugía laparoscópica se ha impuesto en los últimos años frente a la cirugía convencional por sus ventajas: menor invasividad, que implica una disminución de la estancia hospitalaria, disminución del dolor postoperatorio, menor pérdida sanguínea, mayor rapidez en la incorporación social y laboral del paciente así como la posibilidad de realizar una cirugía más precisa debido a la ampliación del campo quirúrgico, con unos resultados equiparables a la cirugía convencional en términos de control oncológico y cirugía reconstructiva.
A pesar de todo la cirugía laparoscópica plantea una serie de inconvenientes, especialmente para el cirujano, como son la prolongada curva de aprendizaje, la restricción de la movilidad provocada por los ejes de los instrumentos, la falta de percepción de la profundidad propia de una imagen en 2 dimensiones (2D), un tiempo quirúrgico más largo, una sensación poco real provocada por el campo virtual unido a la posición poco ergonómica que ha de adoptar el cirujano, con el consecuente aumento del cansancio.
Cuando la cirugía la realizamos con robot, tenemos todas las ventajas de la cirugía laparoscópica convencional: una curva de aprendizaje más corta, una disminución de los tiempos quirúrgicos y una mejora en la movilidad y articulación de los instrumentos, pero sobre todo aporta una visión espacial real en 3 dimensiones. Sin embargo, presenta el inconveniente de ser un sistema complejo, grande, que requiere espacio en un quirófano con un montaje lento en cada paciente y con un material fungible propio patentado con unos precios que cuestionan su coste-efectividad en un sistema sanitario público.
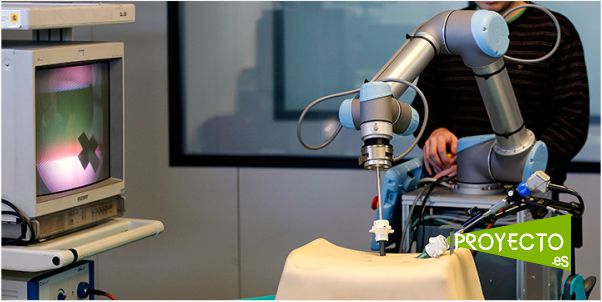
Gracias al Proyecto BROCA, se está trabajando en desarrollar un brazo robótico caracterizado por su ligereza, que ocupa poco espacio, es de software abierto y dispone de una arquitectura de control que permite la colaboración en el mismo espacio físico del robot y el usuario.
El proyecto BROCA se está desarrollando gracias a tres ejes fundamentales, complementarios entre si y de vital importancia en el conjunto del proyecto:
- Investigación Académica. La Universidad de Córdoba es la encargada de desarrollar e implementar la visión artificial en el robot.
- Investigación Clínica. Gracias a la colaboración del Servicio Andaluz de Salud, cirujanos del Hospital Universitario Reina Sofía de Córdoba asesoran y testean el robot. El objetivo es ir adaptándolo a las exigencias de los quirófanos que ya existen para que cuente con características ergonómicas para sus usuarios, tanto paciente como cirujano.
- Investigación, Innovación y Desarrollo Empresarial. Como adjudicataria del proceso de Compra Pública Precomercial, la Fundación Tecnalia es la encaragada de desarrollar toda la parte de ingeniería del Robot. Para ello, dispone de un gran know how en técnicas, materiales y procesos, además de contar con instalaciones adecuadas y equipadas con las tecnologías más vanguardistas.
Fuente: proyecto-broca.es


Deja una respuesta